







Беспилотный вертолёт Ка-37
Беспилотный дистанционно — пилотируемый вертолет Ка-37 (ДПЛА) обладает множеством возможных сфер применения. Ка-37 может использоваться для аэрофотосъемки, обработки сельскохозяйственных полей химикатами, в качестве передатчика (ретранслятора) телевизионного и радиосигнала. Применение ДПЛА Ка-37возможно в целях проведения экологических экспертиз, для предоставления первой необходимой промощи при ликвидации аварий и катастроф в труднодоступных и опасных для человека местах.
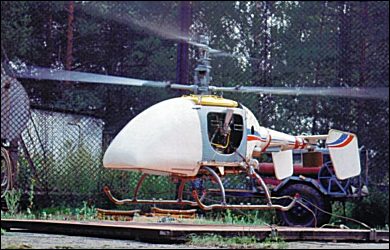
Проектирование дистанционнно — пилотируемого вертолета Ка-37 началось в ОКБ им. Камова в 1991 году. Заказчиком беспилотного вертолета являлась южнокорейская фирма DHI. Первый испытательный полет, прототип Ка-37 совершил в марте 1993 г.
Конструкция фюзеляжа Ка-37 модульная. Винты двухлопастные, противоположного вращения. Оперение двухкилевое. Шасси неубирающееся, лыжного типа. Силовая установка ДПЛА Ка-37 состоит из 2 поршневых двигателей П-037.
В фюзеляже беспилотного вертолета Ка-37 могут размещаться сменные комплекты оборудования:
фотокамеры;
датчики излучений;
оборудование для трансляции и ретрансляции теле- и радиосигналов;
контейнеры для различных грузов.
Вертолёт Ка-37 может управляться с помощью системы автоматического управления, обеспечивающей полёт по заданной траектории с ограниченным вмешательством оператора. Оператор имеет возможность в любой момент полета вмешаться в управление, подавая радиокоманды с наземного пульта дистанционного управления. Наземный пульт управления Ка-37 оборудован непосредственно органами управления, системой отображения информации, автономным источником электроснабжения. Для перевозки вертолёта и пульта управления на автомобиле служит специальный транспортный контейнер.
В 1996 году была произведена модернизация Ка-37. Двигатель вертолета обновлен до модели P-033 мощностью 60 л.с.
Модификации
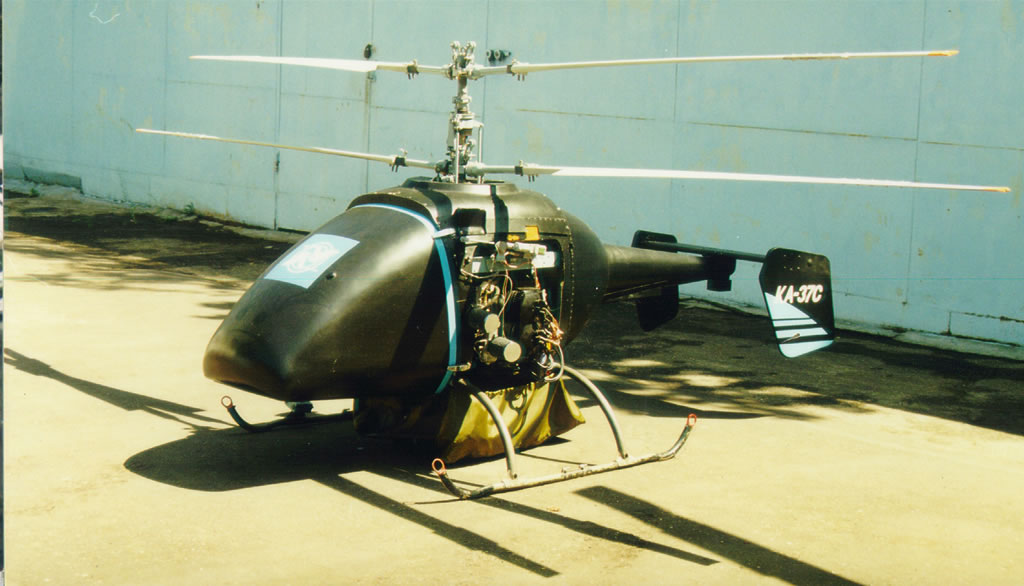
Ка-37С - летающая лаборатория, входящая в состав экспериментального вертолетного комплекса. В нижней части вертолета имеется телевизионная обзорная камера, передающая на НПУ изображение местности, над которой пролетает аппарат. Двиигатель «Хирт»-2706 R06, мощность 63 л.с. (46 кВт). В состав бортового комплекса радиоэлектронного оборудования дополнительно включена аппаратура связи со спутниковой навигационной системой, которая взаимодействует с САУ вертолета.
Конструкция
Вертолет выполнен по сосной схеме, компактен, характеризуется высокими маневренными качествами, транспортировочной мобильностью. Планер - полумонококовой конструкции с набором шпангоутов и диафрагм из дюралюминиевых сплавов и полимерных композиционных материалов. Передний отсек - носовой обтекатель - изготовлен из стеклопластика. Центральный отсек - силовой,снизу он опирается на полозковое шасси. В этом отсеке размещаются силовая установка и системы вертолета. Хвостовой отсек представляет собой хвостовую балку конической формы со стеклопластиковой обшивкой. На ее конце крепится неподвижный стабилизатор с двумя килиевыми поверхностями на консолях. Силовая установка состоит из двух поршневых двигателей П-037 и редуктора, объединенных в единый силовой блок. Каждый двигатель имеет свою топливную систему, систему зажигания и охлаждения. Топливо хранится в алюминиевом баке емкостью 13 л. Редуктор предназначен для уменьшения частоты вращения соосных винтов при передаче на них крутящего момента от двигателей, а также для приведения во вращение генератора и маслонасоса. На входных валах редуктора установлены муфты свободного хода. На выходных валах редуктора крепятся втулки винтов. Несущая система состоит из двух двухлопастных несущих винтов и системы управления. Лопасть винта прямоугольной формы в плане изготовлена с применением естественных и полимерных композитов. Состоит из лонжерона, хвостовой секции и комлевой части. Горизонтальные шарниры втулки - совмещенного типа, вертикальные отсутствуют. Источник постоянного тока - генератор, установленный на редукторе. Электросистема обеспечивает работу систем зажигания двигателей, насоса и перекрывного крана опрыскивателя, а также САУ и аппаратуры радиоуправления. В качестве наземных источников электроэнергии используются аккумуляторные батареи, подключаемые к борту аппарата с помощью отрывного разъема. Система автоматического управления на базе БЦВМ совместно с бортовой радиоаппаратурой, функционально сопряженной с радиоаппаратурой наземного пункта управления, обеспечивает: управление работой силовой установки, формирование управляющих сигналов на электромеханизмы рулевых исполнительных устройств для осуществления взлета, зависания на требуемой высоте, полета по заданной траектории и посадки аппарата в заданном районе в соответствии с принятой программой. САУ адаптирована как к вариантам автоматического пилотирования машины, пилотирования при управлении оператором с наземного пункта управления, так и к комбинации этих вариантов. САУ взаимодействует также с радиовысотомером. Наземный пункт управления оборудован рабочим местом оператора с пультом и рычагами управления беспилотным вертолетом, системой отображения информации на экране персонального компьютера и телевизионной аппаратурой. Пункт включает также радиоаппаратуру управления, источник электроэнергии и средства связи. До взлета вертолета связь с бортом аппарата осуществляется по радио и проводам, а после взлета - только по радиоканалам. Исполнительные электромеханизмы, выполняющие функции рулевых машинок, находятся в четырех каналах системы управления углами установки лопастей несущих винтов. Принцип управления вектором результирующей аэродинамической силы несущей системы, а также реактивными моментами на обоих винтах аналогичен реализованному на аппаратах фирмы. Вертолет и пульт управления перевозятся совместно в специальном транспортном контейнере.

